Problem
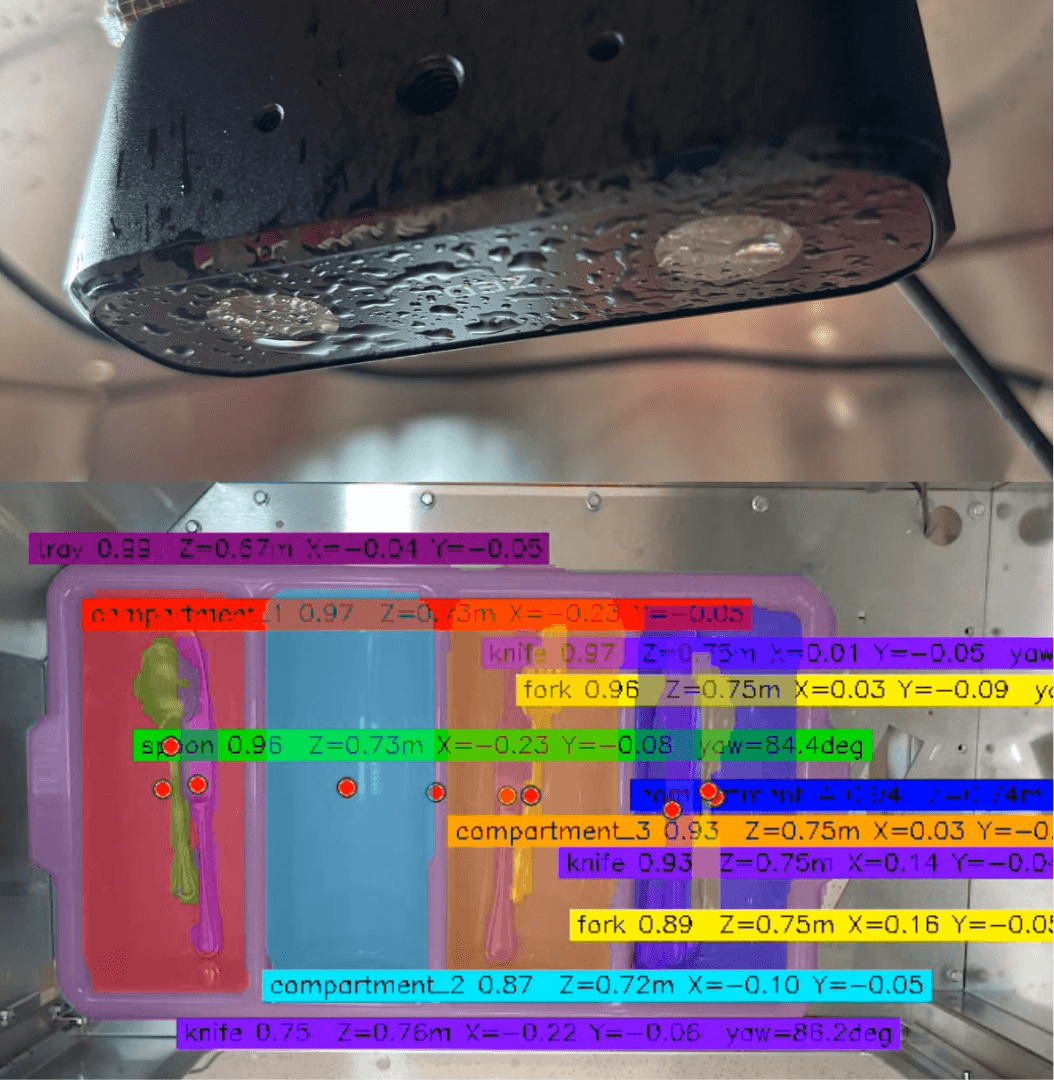
AK Wrap, a well-established Croatian automation company working with high-end cruise industry clients such as MSC, had a real operational need inside its automated cutlery wrapping workflow. To support different spoon, fork, and knife types within the same process, the system required a more intelligent way to detect, classify, and localize cutlery reliably under changing real-world conditions.
Without machine vision, process variability often leads to additional mechanical complexity, reduced flexibility, and more difficult adaptation when different utensil types, positions, or presentation conditions are introduced. In high-throughput industrial environments, this creates pressure on reliability, increases maintenance burden, and limits how scalable the automation can become over time.