Problem
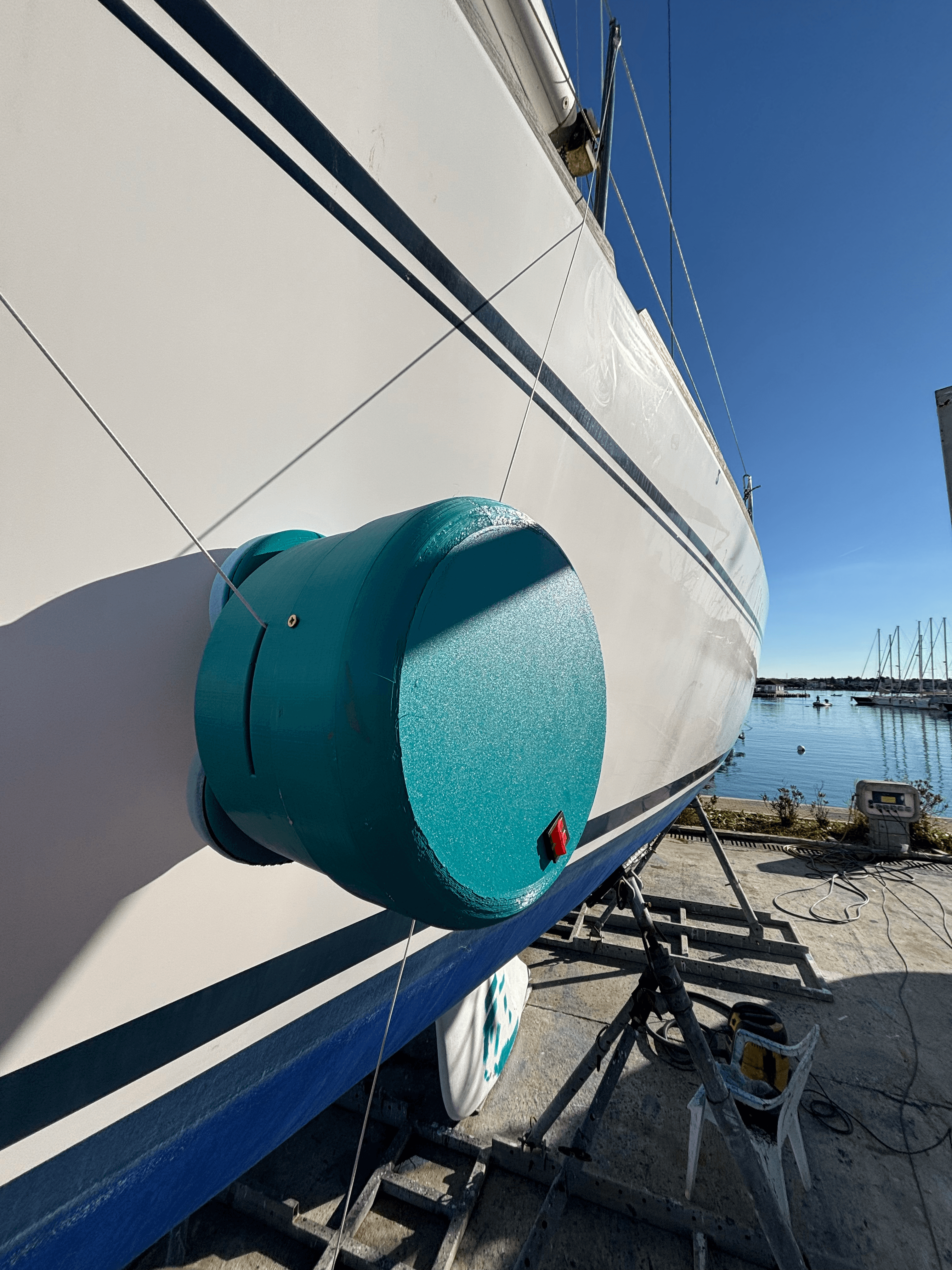
Hull polishing and sanding are physically demanding, time-sensitive, and increasingly difficult to staff at scale. In marinas and maintenance environments, the work still depends heavily on manual labor, operator consistency, and narrow service windows during the season. At the same time, demand remains high, especially in strong charter and leisure vessel markets where many boats require finishing, restoration, and regular surface maintenance in a limited period of time.
The process also creates a difficult working environment. Dust, polishing compounds, surface residue, and repetitive physical effort make the job less attractive and harder to sustain with a reliable workforce. As a result, operators face variability in finishing quality, slower turnaround, and growing pressure to deliver consistent results with fewer available people.